Thesis: The liberation of humanity from physical labour through the use of robots is not merely a possibility, but rather a necessity to promote both human longevity and societal prosperity.
Challenge and Bottleneck: While advancements in sensor technology and computational power are undeniably improving the cognitive abilities of robots (robot brains), these advancements alone are insufficient to pave the way for widespread robotic implementation (ubiquitous robotics). The current limitations of robotic physical forms (robot bodies) pose a significant obstacle to achieving this goal.
New Design Frontiers: Fortunately, progress in the fields of artificial intelligence (AI), control systems, material science, and advanced manufacturing technology presents an opportunity to explore previously inaccessible design spaces. By leveraging this combined progress, we can develop robots with physical capabilities that approach, or even surpass, those of living organisms.
Demographic Shift and Labor Shortages: Humanity stands at a pivotal juncture. The current generation will witness the end of a 10,000-year trend of continuous global population growth. Projections suggest a doubling of the UK population aged over 65 by 2100, with a tripling observed globally. This translates to an anticipated rise in labour shortages, particularly for physically demanding and unskilled work.
Biological Inspiration: Embodied Intelligence and Morphological Computation: Embodied intelligence, or morphological computation, represents a defining characteristic of biological systems. Take insects, their wingbeat frequency aligns with the body’s resonant frequency, while muscles efficiently inject energy during each beat due to their inherent mechanical properties. This simplifies control as precise signal timing becomes unnecessary.
Advantages of Biological Design:
The Bottleneck of Control Algorithms: Currently, human-operated robots outperform autonomous systems in complex, unpredictable environments. This signifies that the current bottleneck lies with inadequate control algorithms.
Synergistic Approach: Unlocking Higher Performance: By jointly optimizing control systems, materials, and body design, we can potentially unlock superior performance while maximizing the efficiency of available power and computational resources. This holistic approach holds the key to developing robots with the capabilities we envision.
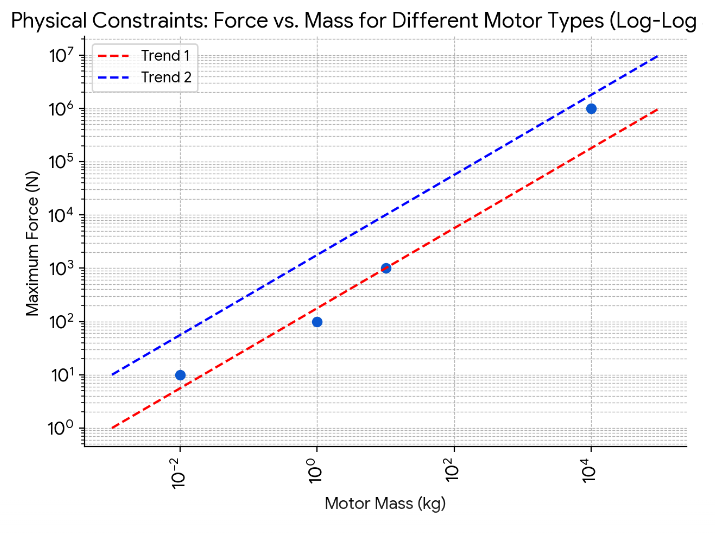
Physical Constraints and Design Space Expansion: The maximum force exerted by various motors (both artificial and biological) plotted against their mass. Interestingly, most data points fall on two distinct lines in a log-log plot, suggesting a potential physical “law” governing the force generation of diverse motor types. Additionally, the data reveals a significant weight disparity between artificial and biological motors, prompting the question: can we create miniature artificial motors for powering robots? [figure 1] – maximum force vs mass
Expanding Design Horizons: Design space limitations. Components that are precise, rigid, expensive, heavy, have limited degrees of freedom, and generate highly predictable movements. Opportunity space opened up by recent advancements, encompassing components that could be flexible, possess potentially infinite degrees of freedom, be tolerant of noise, organic, biodegradable, intelligent, adaptive, and lightweight yet strong.